主题
豆包 P 图的背后
它看起来像魔法,底层其实是受约束的概率生成。
豆包 P 图、即梦、Midjourney 这类产品,最容易让人产生一种错觉:它们像是真的懂你。
你说一句“把肚子 P 小一点”,它真的能改。你再说一句“背景换成海边”,它也真能换。第一次用的时候,那种感觉很像找了一个反应飞快、永不喊累的修图师。
但你多用几次,又会发现它没那么“懂”。你明明只想让肚子小一点,它却顺手给你修出几块腹肌。你想保留衣服褶皱,它偏偏把整件衣服也一起重画了。它很强,但又不完全听话。
这篇文章想讲清楚的,就是这个别扭的事实:这些产品并不是像人类修图师那样,先理解你的意图,再动手处理图片。它们做的事,更接近在一个巨大的概率空间里,一步步把噪声推回到“最像你要求的图像”的那一小块区域里。
听起来有点抽象。没关系,我们慢慢来。
一、文生图不是画出来的,而是“修”出来的
很多人一听“图像生成模型”,脑子里会浮现一个拟人化的画面:模型像画家一样,先理解 prompt,再从空白画布开始下笔。
这其实很误导。
更接近真实的理解是:模型先学会一种能力——如何把被打坏的图片修回来。有了这个能力之后,它才有机会从一团噪声里,一步步“修”出一张图。
训练时,模型先学会去噪
你可以把训练过程想成这样。
先拿一张正常照片。比如,一张海边的人像照。然后故意把它一点点打坏。
一开始,可能只是加一点细碎颗粒,像手机夜拍时的噪点。再往后,图像会越来越模糊,像隔着一层毛玻璃。再严重一点,你可以把它想成打了越来越厚的马赛克。继续加下去,人物轮廓、衣服纹理、背景层次都会被冲散。最后,整张图几乎只剩下一团随机斑点。
这就是“噪声”的直觉版解释。
所谓噪声,不是某种神秘物质。它只是会破坏图像原有结构的信息。它会让边缘变钝,让纹理消失,让五官不再像五官,让天空和海面混成一片。扩散模型最经典的做法,是在训练里逐步往真实图像里加入高斯噪声,然后让模型学习怎么反过来恢复图像。这个思路最早由 Ho 等人在 2020 年提出,叫 去噪扩散概率模型(Denoising Diffusion Probabilistic Models,DDPM)。论文
这里最关键的一点是:模型学的不是“记住这张照片”。
它学的是另一件事——如果一张图已经坏到这个程度,往哪个方向修一点,会更像真实世界里的照片。是让皮肤边缘重新连续起来,还是让衣服纹理回来一点?是让背景变得更平滑,还是让人物轮廓更清楚?
它在训练里反复做的,就是这种判断。
如果把镜头再往工程实现里拉近一点,还有一个很关键的改进。
今天大家熟悉的 Stable Diffusion,背后的核心思路是 2022 年提出的 潜在扩散模型(Latent Diffusion Model)。你不用把这个名字记住,只要理解一点:它不是直接在原始像素上反复处理,而是先把图片压缩到一个更紧凑、更省计算的 latent 空间,再在那里做去噪。
这样做的意义很现实:计算量一下子降了很多,图像生成才真正从“研究上可行”走向“产品里可用”。论文
生成时,模型只是在反着走训练过程
一旦你接受了上面那个训练逻辑,生成图片这件事就没那么神秘了。
生成时,模型不是凭空开始“创作”。它只是把训练时学会的能力反过来用。
训练时,它看过无数“清晰图片怎么一步步变坏”的过程。生成时,它就从最坏的起点开始——一团随机噪声——然后一步一步往回修。
可以把它写成一个很朴素的过程:
text
一团噪声 -> 少一点噪声 -> 轮廓开始出现 -> 纹理慢慢稳定 -> 最终图像这个过程不是一次完成的,而是迭代很多步。每一步,模型都要回答一个问题:当前这张还很乱的图,下一步应该往哪里修,才更像真实图片?
如果把这个过程压缩成一张图,大概就是下面这样:

这就是为什么我更喜欢把扩散模型理解成“修图机器”,而不是“画图机器”。
“画图”这个说法,太像一次性出结果了。扩散模型恰恰不是。它是一点点收敛出来的。
为什么说它是概率生成
问题来了:如果它只是把噪声修回图片,那最后为什么会修出一只猫,而不是一辆自行车?为什么会修出海边,而不是办公室?
因为它修的不是“任意图片”,而是在条件限制下最可能出现的图片。
这就是“条件概率生成”的意思。
如果你不给任何条件,模型就只能从噪声里随便收敛到一张“像图片的图片”。
如果你给它一句 prompt——比如“海边,夕阳,穿白裙子的女生”——那模型在每一步去噪时,就不再是盲修,而是朝着“更像这段描述”的方向修。
它不是先想清楚整张图,再一次性落笔。它更像是在一个巨大的可能性空间里,一边参考条件,一边缩小结果范围。最后出来的那张图,不是“唯一正确答案”,而是“在当前模型看来很有可能成立的一种答案”。
所以文生图不是那种你下一个命令、它就精确执行一个结果的系统。它不像 Photoshop 那样可预期、可定位、可逐项修改。它更像一个受约束的采样系统。
这也为后面的“不听话”埋下了伏笔。
二、条件是怎么喂给模型的
我们可以用文字、参考图、局部重绘区域、姿势草图这些信息来控制生成,而它们进入模型之前,都会先被翻译成模型能处理的数值特征。
先翻译,再引导
模型不直接“看懂”一句话,也不直接“看懂”一张参考图。对它来说,文字和图片最后都要先变成某种内部表示。
如果你看到“高维向量”这种词先别紧张。你可以先把它粗略理解成:模型把这些输入翻译成了一套自己内部能比较、能传递、能持续调用的坐标化便签。
- 文字描述会先变成语义特征
- 参考图会先变成视觉特征
- 局部重绘区域会先变成空间约束
- 边缘图、深度图、骨架图这类输入,会先变成结构特征
你可以把这一步想成:先把人类能读懂的提示,翻译成一套机器内部的便签。
这些便签不会直接替模型把图变出来。它们更像一套持续出现的导航信号。
画成结构图,它更接近下面这个意思:
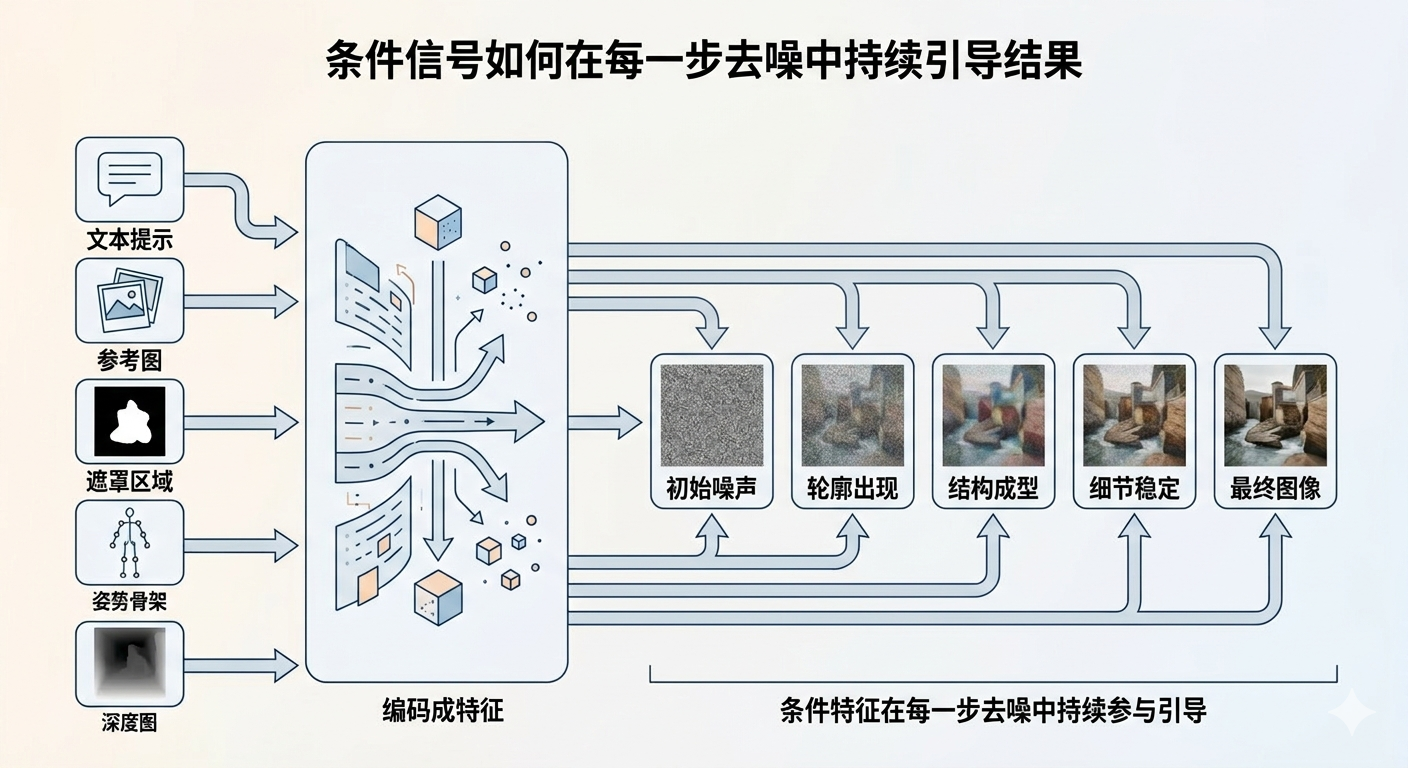
为什么说它们会“反复参与引导”
这里最好的类比,是夜里开车。
你在一个完全陌生的城市里开车。起点不是目的地,中间也不会一脚油门直接冲到终点。你只能一段一段地走。
这时候,导航最重要的作用,不是出发前告诉你一句“终点在浦东”就结束了。真正有用的是它在每个路口都继续说话:前面 300 米左转,这段别上高架,靠右行驶,进辅路。
扩散模型里的条件信号,就是这样的。
当前那张带噪的图,相当于你车现在所在的位置。文字描述、参考图、局部重绘区域、姿势图这些条件,不是开头给一次信息就消失了,而是在每一步采样时都继续参与判断:
- 这一步要更像人脸一点
- 这一步别把背景也改坏了
- 这一步人物姿势要贴着参考骨架
- 这一步衣服颜色要往指定方向靠
如果你更喜欢修图的类比,也可以把它想成修复一张老照片。
桌上摆着几样参考:一张文字说明,一张人物参考照,一个遮罩区域,一张姿势草图。你不可能只看一眼这些材料就闭眼开修。你每修一笔,都会重新抬头看一下参考,确认别修偏了。
模型也是一样。区别只是,人类修图师用眼睛对照,扩散模型用数值特征对照。
这也是各种控制手段的统一解释
一旦你接受“先编码成特征,再在采样过程中持续引导”这个视角,很多看起来五花八门的控制手段,就没那么散了。
到这里,其实可以先别急着记产品名词。
不管它在界面上叫 prompt、参考图、ControlNet、mask,还是 LoRA,它们底层都在做同一件事:给去噪过程增加约束。
你可以先把它们理解成几类不同的“控制旋钮”,至于名字,后面再慢慢对上就行。
如果把这些旋钮摆在一张图上,它们的关系大概是这样的:

差别只在于,这些约束作用的维度不同。
- 有的在控制语义——画什么
- 有的在控制结构——怎么摆
- 有的在控制区域——哪块能改
- 有的在控制风格和能力边界——模型本来擅长什么
这就是为什么同一套底层原理,最后能长出文生图、图生图、局部重绘、姿势控制、多图融合这些完全不同的产品能力。
三、它为什么会不听话
现在回到文章开头那个问题。
你让它把肚子 P 小一点,它为什么会给你修出腹肌?
因为它收到的不是一个精确、可验证的 Photoshop 指令。它收到的是一个条件信号,然后它要在自己的统计经验里,去找“最可能符合这个信号的图像方向”。
这两者差别很大。
prompt 是软控制,不是硬命令
我们习惯把 prompt 理解成命令,但对图像生成模型来说,prompt 更像一种软控制。
“把肚子 P 小一点”这句话,对人类修图师来说很明确:局部收一点,别动别的地方。
但对模型来说,这句话会激活一整片语义相关区域。
在训练数据里,“更小的肚子”可能经常和下面这些东西一起出现:
- 更明显的腰线
- 更紧致的腹部轮廓
- 更健身风格的身体状态
- 更清楚的肌肉线条
于是模型在采样时,可能不是理解成“局部收缩 8 个像素”,而是理解成“把这个区域往更瘦、更健身、更符合这类照片统计特征的方向推一推”。
结果就可能从“小肚子没了”,一路滑到“腹肌出来了”。
它不是故意跟你抬杠。它只是猜偏了。
模型擅长统计相关,不擅长读心
这件事说穿了并不神秘。
扩散模型强的地方,是它学到了海量图文对之间的统计关系。什么样的描述常常配什么样的视觉结果,它很敏感。
但“我真正想保留什么,只想改哪一点,哪些东西绝对别动”,这些是更细颗粒度的意图。对模型来说,它们并不总是清晰的。
这也是为什么现在很多产品都在拼编辑能力,而不只是拼谁生图更好看。
如果把视角稍微从“模型原理”切到“产品竞争”,你会发现大家最近发力的方向其实很一致:不是只让图更好看,而是让编辑更可控、更稳定、更像是真的在“按你的意思来”。
比如,Google 在 2025-08-26 发布 Gemini 2.5 Flash Image 时,官方重点强调的能力里,就包括多图融合、角色一致性,以及用自然语言做更精确的局部编辑。官方博客
字节 Seed 团队在 2025-04-15 发布的 Seedream 3.0 Technical Report 里,也把复杂 prompt 对齐、中文复杂文本渲染、原生 2K 分辨率输出和明显加速列成重点改进项。官方技术报告
这些升级背后的目标,其实都很朴素:让模型少一点“自作聪明”,多一点“按你的意思来”。
只是这件事远比做一张好看的图难。
因为好看,可以靠统计规律。听话,需要更强的条件对齐、局部控制、一致性建模,甚至还要补上一些世界知识和后训练对齐。
四、生成图片真正可控的,只有 6 类东西
如果把产品名词都拿掉,只保留第一性原理,图像生成里真正可控的因素,其实可以归纳成 6 类。
这 6 类不是某个框架私有的术语,而是一种更底层的视角。你一旦接受它,很多产品功能都会自动归位。
1. 目标分布:你希望结果“像什么”
这是最直观的一类控制。
你想生成一个赛博朋克城市夜景,还是一张婚纱照?你想要写实风格,还是动漫风格?你想要“干净的产品图”,还是“胶片感的人像”?
这些都在决定最终结果应该落到哪一片图像分布里。
prompt、negative prompt、风格描述、类别描述、部分参考图语义,基本都属于这一类。
它们做的事,不是直接指定每个像素,而是缩小“什么样的图算合格”的范围。
2. 初始状态:生成从哪里开始
很多人以为生成图片永远从纯噪声开始。其实不是。
- 文生图通常从纯噪声开始
- 图生图通常从已有图片编码后的 latent 开始
- 修图、重绘、风格迁移,也往往从“已有图像 + 加噪后的状态”开始
这就是为什么“P 图”和“生图”不是两套原理。
前者只是没有从完全随机出发,而是从一张已经带有结构信息的图开始。SDEdit 这类工作展示的正是这种思路:先给已有图片加噪,再让模型在条件下把它重建回来。论文
起点不同,最后结果的自由度就不同。
从纯噪声出发,想象空间最大,但也最容易跑偏。从原图 latent 出发,保留原图结构的机会更大,但可改动空间也会更受限。
3. 生成路径:模型怎么从起点走到终点
就算目标一样、起点一样,路径不同,结果也会变。
这类控制,在产品或开源工具里常常会表现成一些参数项。你不必记住名字,只要知道它们控制的是“这条生成路径怎么走”。
常见的几类包括:
- 走得快还是走得稳
- 一共走多少步
- 多大程度上强行贴近条件
- 保留原图多少、放开改动多少
它们控制的不是“审美喜好”,而是生成轨迹本身。
你可以把它理解成导航策略。有的路线更快,但可能粗糙;有的路线更稳,但要多走几步;有的路线更强调条件一致性,但可能让图变得僵硬。
Classifier-Free Guidance 就是一个很典型的例子。它的核心思路,是同时估计“无条件去噪方向”和“有条件去噪方向”,再在推理时把更符合条件的方向放大。论文
所以 CFG 开大时,图常常更贴 prompt,但也更容易失真、过饱和,或者看起来“太用力”。
4. 条件信号:模型生成时参考哪些额外信息
这是最容易被产品表象遮住,但其实最核心的一类。
prompt 控制,本质上就是条件信号控制。
参考图、角色图、边缘图、深度图、姿势骨架、ControlNet、多图融合输入,本质上也都属于条件信号。它们控制的是不同维度:
- prompt 更偏语义
- 参考图更偏身份、材质、局部视觉特征
- 边缘图和骨架图更偏结构
- 深度图更偏空间关系
- 多图融合更偏跨图像的信息拼接
这些输入之所以能控制结果,不是因为模型“看见了原图就照着抄”,而是因为它们先被编码成特征,然后在每一步去噪里反复影响更新方向。
ControlNet 的价值就在这里。它相当于把额外结构条件更稳定地接入扩散模型,让“照着骨架画”“照着线稿画”“照着深度关系画”这件事变得更可靠。论文
5. 可修改区域:哪些地方能动,哪些地方别动
这类控制解决的是空间边界问题。
如果没有区域约束,模型往往会在你不想动的地方也一起重画。你本来只想改衣服颜色,它顺手把脸、背景、光线一起洗了一遍。
mask 的作用,就是告诉模型:主要改这里,别处尽量保持。
局部重绘、局部修复、扩图,本质上都属于这一类。
RePaint 这类工作展示了这个逻辑:在掩码区域里重新采样,同时尽量保持未掩码区域一致。论文
所以“哪一块能改”不是一个 UI 层的小功能,它直接决定了逆扩散过程中自由度被限制在哪个空间范围里。
6. 模型能力边界:模型本身会什么,不会什么
最后这一类,经常被用户忽略。
很多人以为 prompt 写得更长,就能强行把模型逼出它不会的能力。其实不行。
如果模型本身不擅长中文排版,不擅长某种特定画风,不擅长稳定保留角色一致性,那你再怎么写 prompt,也只能在它现有能力边界内挣扎。
checkpoint、LoRA、adapter、VAE、refiner 这些名字听起来很杂,但你不用一个个记。粗略理解就够了:它们很多时候改变的不是一次采样里的局部方向,而是模型本身会什么、偏好什么、表达上限在哪里。
这也是为什么字节在 Seedream 3.0 里会把复杂中文字形排版专门拿出来讲。不是 prompt 工程突然变强了,而是模型自己的能力边界变了。官方技术报告
五、为什么这些约束真的能控制结果
讲到这里,其实可以把整件事压缩成一句话:
生成图片,本质上是在所有可能图片里,找到一张最符合给定约束的结果。
那些看起来花哨的控制手段,真正做的事都是同一种事:缩小模型的自由度。
- 目标分布告诉它“最后大概要像什么”
- 初始状态告诉它“从哪里出发”
- 生成路径告诉它“怎么走过去”
- 条件信号告诉它“每一步往哪边靠”
- 可修改区域告诉它“哪块能动”
- 模型能力边界决定了“它最多能做到什么程度”
从这个视角再看产品层的“黑科技”,很多东西就不再神秘了。
为什么你写一句话就能让它生成图?因为文字先被编码成语义特征,再在采样时持续引导去噪方向。
为什么你上传两张图就能让它融合?因为多张图也可以先被编码成条件特征,再一并参与采样。
为什么你画一个 mask 就能只改局部?因为 mask 直接限制了可修改区域。
为什么同样一句 prompt,换个模型结果差很多?因为模型能力边界不一样。
Google 的 Gemini 2.5 Flash Image 官方介绍里,已经把这种多模态能力写得很明确:模型可以综合文本和图像等多种输入信息来完成生成与编辑。官方博客
你看到的是“一个提示词就能搞定”,模型内部看到的其实是一大组编码后的条件,再配上一条反复纠偏的采样轨迹。
这就是今天这些产品越来越像魔法的原因。
不是因为它们真的会画画,也不是因为它们真的懂你。
而是因为它们已经很会把各种约束揉进一条去噪路径里了。
六、理解原理,也是在理解它的边界
回到文章最开始那个场景。
你让它把肚子 P 小一点,它却给你修出腹肌。这件事好笑,但它其实很诚实。
它提醒你:今天这些图像模型已经很强了,强到一句话就能改图、扩图、重绘、融合多张图,强到界面层看起来只剩下一个输入框。
但它们依然不是精确执行器。
它们是受条件约束的概率生成系统。它们靠的是统计规律、条件对齐、迭代去噪和越来越强的多模态特征注入,而不是像人类修图师那样真正理解“你心里那一点微妙的意思”。
这不是坏消息。
恰恰相反。只有当你理解了这一点,prompt、参考图、ControlNet、mask、LoRA 这些东西才不再像零散技巧,而会重新排成一张清楚的地图。
你也会更容易明白,为什么有些时候该改 prompt,有些时候该换参考图,有些时候该上 mask,有些时候干脆该换模型。
产品把复杂性藏在了按钮后面,所以你感受到的是魔法。
而原理把魔法拆开之后,剩下的其实是一件非常朴素的事:从噪声出发,在约束之下,一步步逼近一张最可能的图。
这,就是“豆包 P 图”的背后。